二足歩行ロボットの製作
二足歩行ロボットの紹介
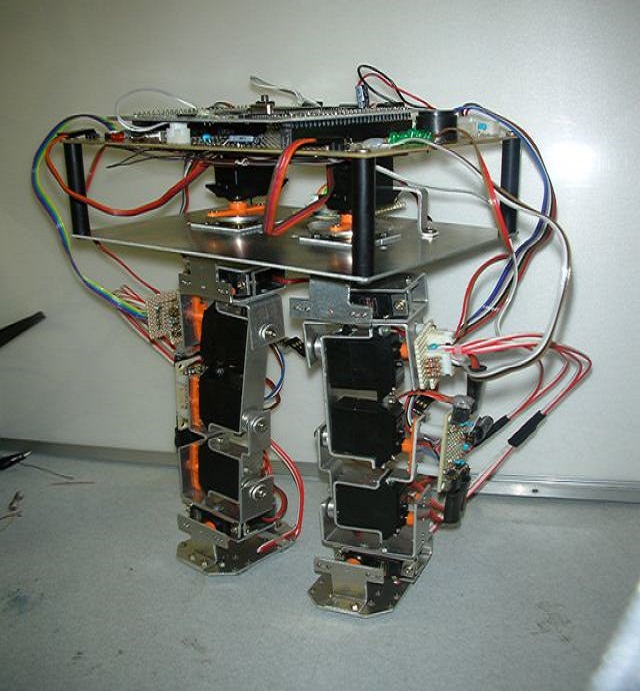
| 仕様 | |
|---|---|
| 全高 | 275mmm |
| 重量 | 1〔kg〕 |
| 関節自由度 | 6 |
| 制御用CPU | SH7045 |
| アクチュエータ | GWS Micro2BBMG |
| 感圧センサ | ADXL311 |
| 感圧センサ | 感圧センサ |
短大時代に卒業研究で製作した「二足歩行ロボット」です。 下半身だけです。筐体等は,アルミの板を切ったり曲げたりして,自分で作りました。 結構苦労しました。マイコンは秋月電子製のSH7045を使用しています。 PWMが12相独立して出力できるということでこのマイコンに決めました。 残念ながら,加速度センサ,感圧センサの値をフィードバックして自立して歩行する というところまでは当時達せいできませんでした。 何が他と違うかというと,逆運動学を用いて歩行モーションを作りました。