歩行動作
歩行動作の説明
ここの理屈は少々厄介です。結論から言うと,平面3リンクマニュピレータの幾何学的関係を二足歩行ロボットの足に応用して動かしています。
平面3リンクマニュピレータって何かというと,簡単には棒を三つ用意して,それを蝶番みたいなのでつなげて,1本のクネクネ曲がる棒みたいにしたイメージです。まさに,それをロボットの足に応用しようというわけです。
さぁ~、ちょっと数学のお時間です。高校で三角比なんてどこで使うねん! と思った高校生の方(私もその一人です)こんなところで使用します。 (今の日本教育にはこういうのがないからみんなつまんな~いってなっちゃうんだよね)
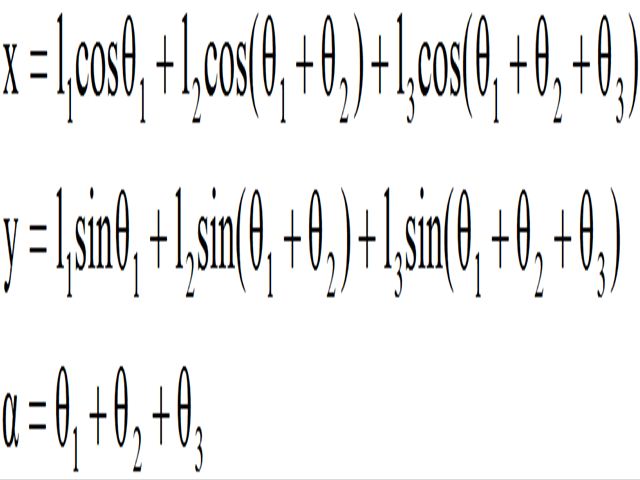
さて,この上の式のX,Yはここで言うと,足のデカルト座標上の位置を表しています。 この式に,θ1,θ2, θ3の値を代入すれば,3リンク マニュピレータの先端(ここで言うところの足首の座標)が求まります。しかし、私たちが制御する対象 はRCサーボモータの回転角です。よって,角度そのものが初めから分かりません。したがって 制御云々の議論が成り立ちません。ちなみに,この場合の問題を順運動学といいます。 私たちの知りたい(制御したい)ことは,「足首の座標をここにもってくるには各RCサーボモータを何度の角度に制御すればよいか」です。 したがって,上の式のx,y,α(姿勢角:x軸から反時計周りに足首の角度が何度回転しているかという意味)から,θ1,θ2, θ3を求めるということを をマイコンのCPU内で行い,知りたい角度を計算でもって算出し制御するということを行いたいわけであります。 これが,まさしく逆運動学というものです。
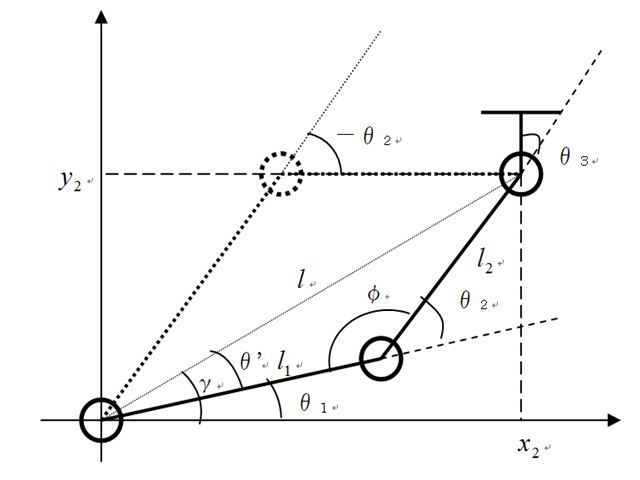
上の右図を用いて説明します。第1関節(xy座用原点の丸)と第3関節(x2,y2の丸)を直線で結び,その直線をlとすると 2点間の距離の公式より(または,三平方の定理)より,
数式後で記載しておきます
ℓ=\surd (x2-0)^2 + (y2-0)^2
上記動画、実はよく見ると後ろで手で支えています。自立歩行は出来ていません。難しいですね。バランスをとるというのは。したがって、仕様の表に載せている感圧センサは実は装備しているだけで機能しておりません。ただ当時はだいぶ勉強になりました。